MiMo-Embodied — это крупная foundation-модель (базовая модель общего назначения), которую команда Xiaomi обучила сразу для двух классов задач:
- автономное вождение (автомобили),
- embodied AI — «воплощённый ИИ» для роботов и других физических устройств. (arXiv)
Ключевые особенности:
- Кросс-доменная архитектура.
MiMo-Embodied — это vision-language model (VLM):- на вход получает изображения/видео с камер, LiDAR-карты, другой сенсорный поток + текстовые инструкции;
- на выходе генерирует текстовые описания, планы действий или «команды высокого уровня» (куда ехать, что делать, какие объекты важны и т.п.).
Архитектура построена на предыдущей модели MiMo-VL Xiaomi и дообучена так, чтобы один и тот же «мозг» мог одинаково хорошо понимать и уличные сцены (для машины), и домашние / складские помещения (для робота). (huggingface.co)
- Обучение на объединённом датасете трёх типов.
Авторы подчёркивают, что специально собрали и «сшили» три вида данных: (arXiv)- общий визуально-текстовый корпус (картинки, подписи, вопросы-ответы) — чтобы модель понимала «обычный мир» и язык;
- embodied-датасеты (роботы, манипуляторы, агенты в симуляции) — задачи планирования действий, взаимодействия с предметами, навигации в помещениях;
- датасеты по автономному вождению — реальные и симулированные дорожные сцены с разметкой объектов, траекторий, состояний и манёвров.
Это даёт модели общее пространство представлений: объекты и физика мира понимаются ею одинаково и в квартире, и на дороге.
- Многоступенчатое обучение + донастройка CoT/RL.
В техотчёте описан многошаговый пайплайн: (arXiv)- сначала крупное предобучение на общих визуально-языковых данных;
- затем отдельные фазы для embodied-задач и для вождения;
- на финальном этапе — Chain-of-Thought (CoT, обучение пошаговому рассуждению) и дообучение с подкреплением (RL) по специализированным метрикам качества.
Важный вывод авторов: эти два домена положительно влияют друг на друга — обучение на роботах улучшает способность модели понимать сложные дорожные сцены и наоборот.
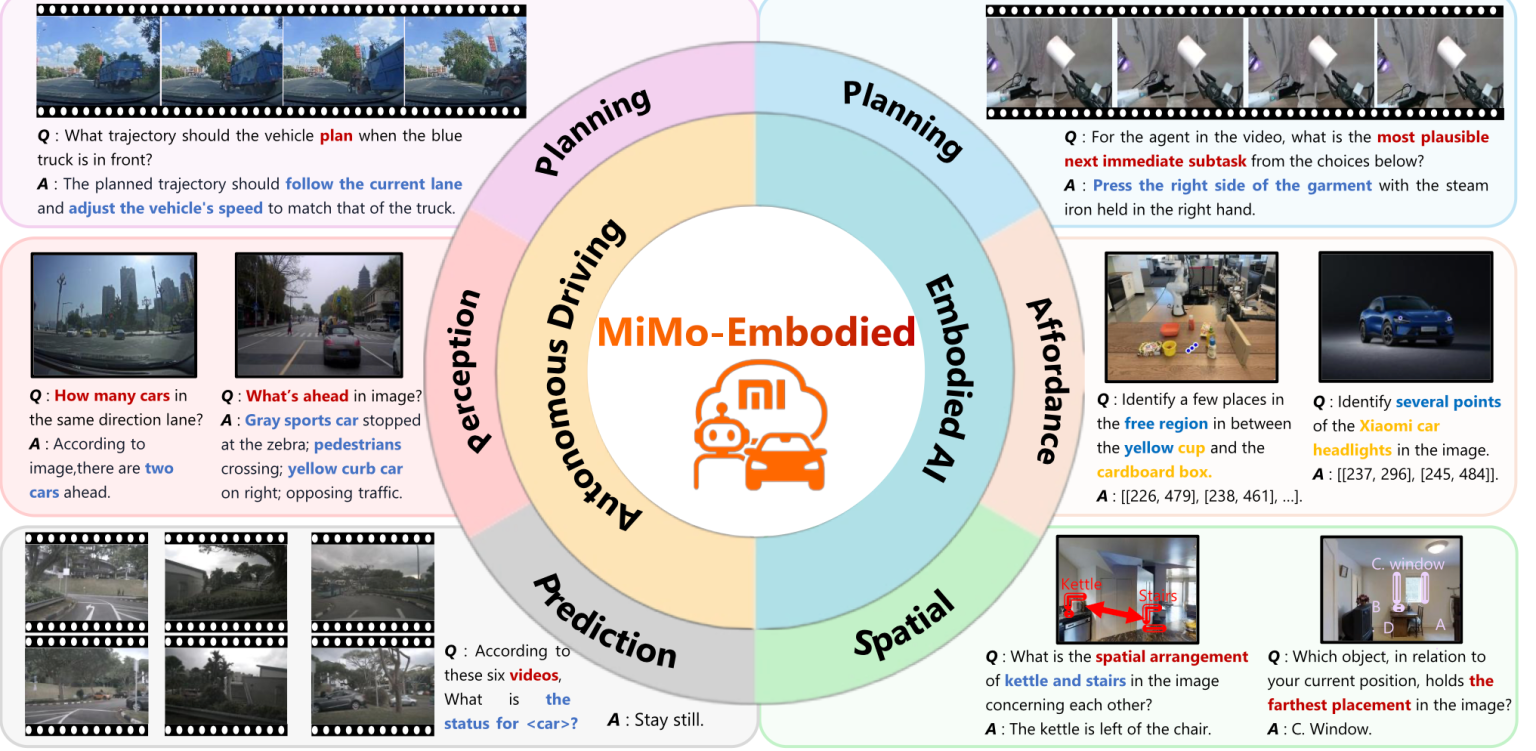
- Результаты на бенчмарках.
В статье и обзорах подчёркивается, что MiMo-Embodied: (arXiv)- устанавливает новые рекорды (state-of-the-art) на 17 бенчмарках embodied-ИИ:
• планирование задач (дать роботу цепочку действий для достижения цели);
• affordance prediction — понимание того, «что можно сделать» с объектом (взять, толкнуть, открыть и т.п.);
• пространственное понимание (сложная 3D-геометрия сцены, навигация, препятствия); - показывает очень высокие результаты на 12 бенчмарках автономного вождения:
• восприятие окружения (распознавание машин, пешеходов, полос, светофоров);
• предсказание поведения участников движения (куда поедут, как изменят скорость);
• планирование траектории (безопасные и плавные манёвры).
- устанавливает новые рекорды (state-of-the-art) на 17 бенчмарках embodied-ИИ:
- Открытый код и веса.
Xiaomi не просто публикует статью, но и открывает репозиторий и веса модели (например, вариант MiMo-Embodied-7B на Hugging Face), что позволяет исследователям и компаниям: (huggingface.co)- запускать модель у себя;
- дообучать под свои роботы или автомобили;
- разбирать архитектуру и обучающий пайплайн.
Для китайской «большой четвёрки» (Huawei, Baidu, Alibaba, Xiaomi) это довольно редкий уровень открытости.
- Связь с бизнес-стратегией Xiaomi.
В новостях подчёркивается, что MiMo-Embodied — это не «академическое упражнение», а элемент стратегии Xiaomi в электромобилях (Xiaomi SU7) и домашних / гуманоидных роботах. Компания явно строит единый ИИ-стек, способный управлять и автомобилями, и роботами на одной архитектуре. (scmp.com)
Почему важно
- Шаг к «универсальному физическому ИИ».
До сих пор модели для автономного вождения и для роботов развивались почти раздельно: разные датасеты, разные архитектуры, разные команды. MiMo-Embodied показывает, что одна модель может адекватно работать сразу в нескольких физических доменах (дороги, помещения), при этом домены взаимно усиливают друг друга. - Упрощение инженерии и снижение порога входа.
Для разработчиков это означает возможность строить единый стек perception–prediction–planning:- одна модель обрабатывает сенсоры,
- одна отвечает за понимание сцены,
- одна же — за планирование поведения.
Это снижает сложность системы, облегчает перенос на новые платформы (другие роботы, новые типы машин) и сокращает «зоопарк» специализированных моделей в продакшне.
- Более богатый «опыт мира» = потенциально более безопасное поведение.
Благодаря объединённому обучению MiMo-Embodied видит разнообразнейшие ситуации: от коридора с коробками до перекрёстка с пешеходами; из этого может родиться более устойчивое понимание физических закономерностей (где скользко, где кто-то перекроет путь, как меняется обзор и т.д.).
Это важно для безопасности: чем больше модель «понимает мир» вне узкого домена, тем лучше она должна реагировать на редкие, нестандартные ситуации. - Одновременно — рост требований к тестированию и безопасности.
Обратная сторона: одна и та же модель может управлять разными типами критичных объектов — автомобилем на 120 км/ч и, скажем, складским роботом рядом с людьми. Ошибка ИИ мгновенно проявляется в физическом мире.
Это означает:- необходимость жёсткой сертификации, симуляций, формальных тестов и стресс-сценариев для каждого домена;
- развитие методов проверки устойчивости VLM к adversarial-атакам, промпт-инъекциям и некорректным данным датчиков;
- юридические и этические вопросы распределения ответственности между разработчиком модели, производителем устройства и оператором.
- Серьёзная заявка на открытый стандарт в «воплощённом ИИ».
MiMo-Embodied — открытая модель от крупного индустриального игрока, а не от академического консорциума. Это может:- создать де-факто стандарт для исследований и сравнений в embodied-ИИ и автономном вождении;
- дать другим компаниям и университетам мощную базу, на которой можно строить собственные системы (включая проекты по линии университетов, госпрограмм и т.п.);
- усилить конкуренцию с закрытыми стекми автопроизводителей и Big Tech, что в долгосрочной перспективе хорошо для прозрачности и безопасности.
- Геополитический и рыночный контекст.
На фоне конкуренции США–Китай в области ИИ и электроники открытие такой модели китайской компанией:- демонстрирует технологическую зрелость китайской школы embodied-ИИ и автономного вождения;
- повышает привлекательность Xiaomi как технологического партнёра для автопроизводителей и робототехнических компаний в Азии, Европе и РФ;
- создаёт для других игроков (включая европейских и российских) ориентир по уровню открытости: к чему стоит стремиться, если вы хотите не только догонять, но и влиять на развитие области.
Источники (прямые ссылки)
- arXiv (техотчёт Xiaomi):
https://arxiv.org/abs/2511.16518 (arXiv) - Hugging Face (открытая модель MiMo-Embodied-7B):
https://huggingface.co/XiaomiMiMo/MiMo-Embodied-7B (huggingface.co) - GitHub Xiaomi MiMo-Embodied (код и веса):
https://github.com/XiaomiMiMo/MiMo-Embodied (GitHub) - Обзор на goodtech.info (французский разбор результатов на 29 бенчмарках):
https://goodtech.info/xiaomi-mimo-embodied-ia-open-source-robots-voitures/ (Goodtech) - Новостные обзоры (выборочно):
• SCMP: https://www.scmp.com/tech/big-tech/article/3333787/xiaomi-open-sources-ai-model-spanning-autonomous-driving-and-robotics (scmp.com)
• AIbase / AINews: https://news.aibase.com/news/23013 (news.aibase.com)
• EEWorld / QbitAI: https://en.eeworld.com.cn/mp/QbitAI/a411621.jspx (en.eeworld.com.cn)
Related Posts

Искусственный интеллект на перепутье: Технологический прорыв, консолидация рынка и глобальные вызовы (06-11 мая 2025)
Минувшая неделя стала ярким свидетельством того, как искусственный интеллект (ИИ)...
ИИ на грани перемен: обзор главных мировых событий за неделю (30.04–04.05.2025)
Мир вступает в новую фазу ИИ-революции. За прошедшую неделю искусственный...
ELIZA: Королева имитации. Как старый чат-бот заставил мир говорить с машинами (и почему это важно до сих пор)
Вместо пролога: Далекий 1966 год. Компьютер не понимает, но делает...