Обучение с подкреплением (Reinforcement Learning, RL) — это раздел машинного обучения, который изучает, как агенты могут принимать решения в последовательных задачах, взаимодействуя с окружающей средой. Цель агента заключается в максимизации суммарной награды путем выбора оптимальной политики. RL широко применяется в робототехнике, игровой индустрии, экономике и медицине. В настоящей статье представлен обзор ключевых аспектов RL, включая базовые концепции, алгоритмы и современные достижения.
Основные концепции обучения с подкреплением
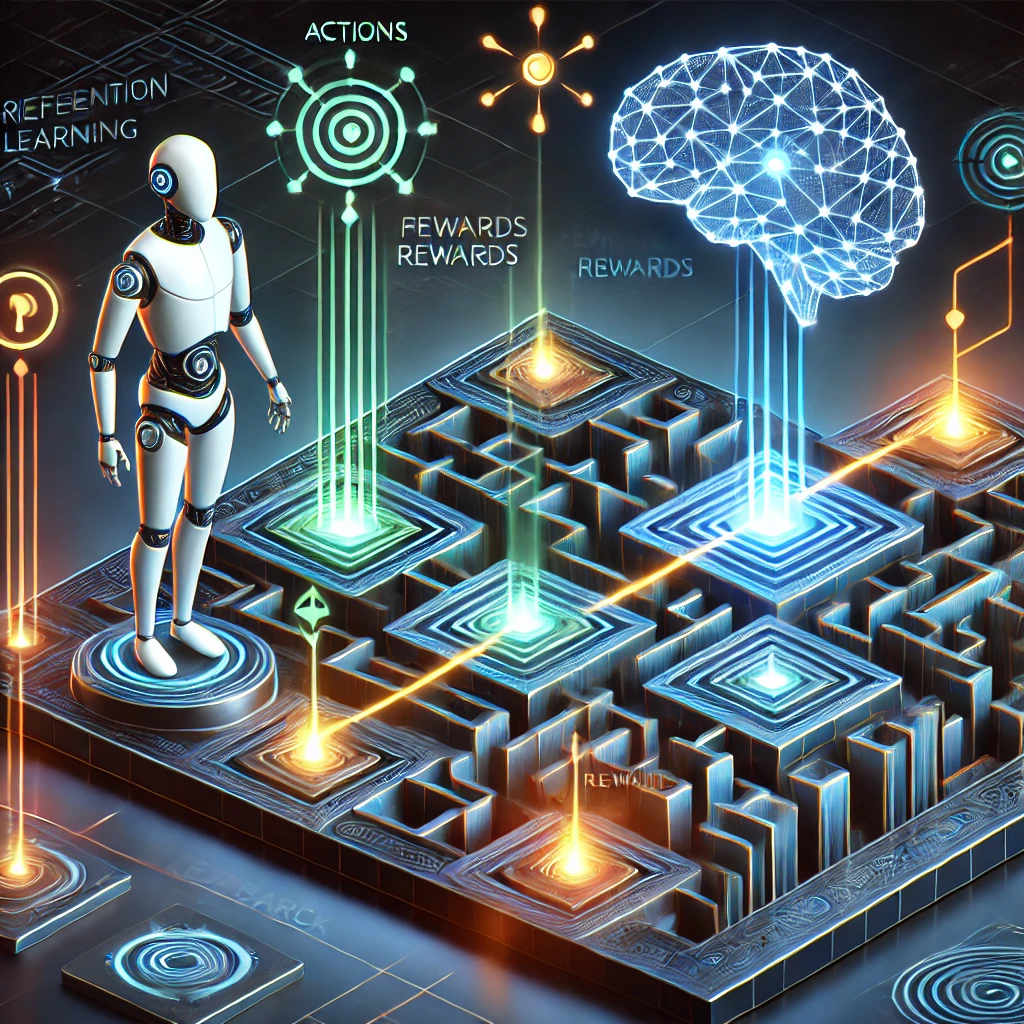
1. Последовательное принятие решений:
Агент взаимодействует с окружающей средой, определяемой состояниями (state), действиями (action) и наградами (reward). Основной задачей является поиск политики π\piπ, которая максимизирует ожидаемую совокупную награду.
2. Марковские процессы принятия решений (MDP):
Основная математическая модель RL, описывающая состояние среды, действия агента, вероятности переходов и функции наград. Включает:
- Переходы: вероятности P(s′∣s,a)P(s’|s, a)P(s′∣s,a), описывающие, как среда реагирует на действия агента.
- Функция наград: определяет ценность действий R(s,a)R(s, a)R(s,a).
3. Баланс исследования и эксплуатации (exploration-exploitation):
Агенту необходимо исследовать среду для сбора данных и одновременного использования текущей информации для получения максимальной награды.
Методы обучения с подкреплением
1. Методы на основе ценностей (Value-based RL):
Используют оценку ценности состояний (value function), чтобы определять действия. Примеры: Q-обучение, SARSA.
- Q-обучение: находит оптимальную политику, обучая функцию ценности Q(s,a)Q(s, a)Q(s,a), даже если модель среды неизвестна.
- Deep Q-Networks (DQN): включает нейронные сети для обработки сложных, непрерывных сред, с использованием реплей-буфера и целевых сетей.
2. Политико-ориентированные методы (Policy-based RL):
Оптимизируют политику напрямую, например, с помощью градиента политики (REINFORCE) или алгоритмов актор-критик (A2C, PPO, SAC).
- Proximal Policy Optimization (PPO): популярный метод, обеспечивающий устойчивое обучение за счет ограничения обновлений политики.
3. Моделируемое RL (Model-based RL):
Использует внутреннюю модель среды для планирования действий и предсказания последствий, что ускоряет обучение.
Современные направления исследований
- Иерархическое RL (HRL):
Разделение задач на подзадачи, позволяющее агентам решать более сложные проблемы. - Обучение на основе имитации (Imitation Learning):
Агенты учатся действовать, наблюдая за демонстрациями экспертов. - Обучение с подкреплением для больших языковых моделей (LLMs and RL):
Используется для улучшения моделей, таких как ChatGPT, с помощью методов RLHF (обучение с подкреплением от обратной связи человека). - Дистрибутивное RL:
Моделирование распределений возможных наград, что полезно для учета неопределенности в задачах. - Офлайн RL:
Обучение на статических наборах данных без взаимодействия с реальной средой.
Примеры из практики
- Игры: AlphaGo и AlphaZero используют Monte Carlo Tree Search (MCTS) в сочетании с глубоким обучением.
- Робототехника: RL применяется для управления дронами, манипуляторами и автономными транспортными средствами.
- Рекомендательные системы: Контекстные многорукие бандиты помогают выбирать персонализированные рекомендации.
Заключение
Обучение с подкреплением представляет собой мощный инструмент для решения сложных задач, требующих последовательного принятия решений. Основные подходы, такие как методы на основе ценностей, политики и моделей, дополняются современными разработками, включая иерархическое и офлайн обучение. Сфера RL быстро развивается, обеспечивая новые решения для реальных приложений.
Рекомендуемая литература
- Sutton, R., Barto, A. Reinforcement Learning: An Introduction. MIT Press, 2018.
- Arxiv.org: Kevin Murphy’s RL Tutorial.
- Silver, D., et al. Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm. Nature, 2018.
Related Posts
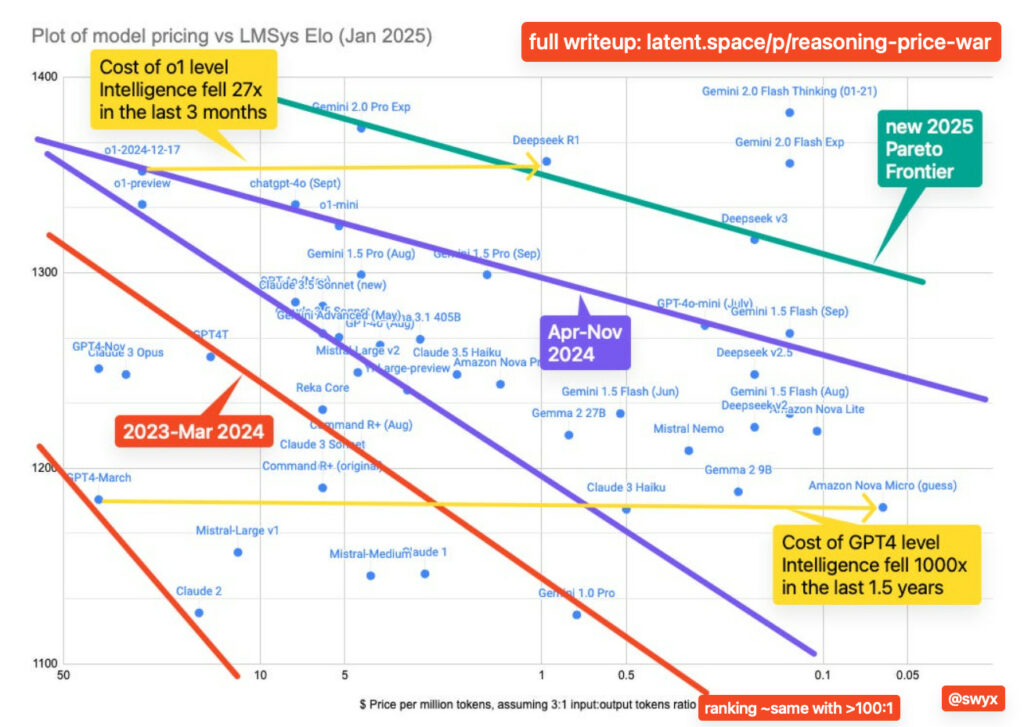
Ценовые войны в сфере искусственного интеллекта: анализ текущих тенденций и стратегий
Искусственный интеллект в медицине: текущие применения, перспективы и новейшие разработки